

Je reviens sur d'autres explications du schéma ...
L'alimentation-régulation déjà citée était pleinement analogique et plutôt prévu pour mes zones cachées ...
En parallèle , pour mes zones de voies visibles , un autre type de circuit , à base d'une alimentation par courant haché-pulsé , a été créé .
Le principe en est simple : au lieu de faire monter ou baisser la tension sur le canton de voie concerné on envoie uniquement du 14 Volts mais par séries continues d'impulsions plus ou moins longues , le reste du temps rien n'est envoyé ( on tombe à 0 Volt ) . Lorsque les impulsions sont courtes on a une vitesse ralentie , lorsqu'on les augmente , la vitesse accélére , lorsqu'on n'envoie que des impulsions de 14 Volts et pratiquement plus de 0 Volt la vitesse est au maximum .
L'avantage du systéme par courant haché-pulsé est que les points de freinage du courant ( longueurs des câblages et voies , mauvais contacts rails-roues , faisceaux d'aiguillages , frotteurs moteur , inertie magnétique des rotors-stators .. ) qui font perdre l'énergie à basse tension en analogique , sont très facilement franchis sans pertes par les impulsions , le courant étant d'office en 14 Volts ( donc en "plein pot " ! ) .
Grâce à cela on peut se faire mouvoir les motrices à basse vitesse pour les manoeuvres , chose plus aléatoire en jouant avec le niveau du courant analogique .
Pour faire mes modules de courant haché-pulsé je suis parti d'explications glanées sur le net puis j'ai recomposé le circuit pour l'appliquer à mes composants .
Photo : Un de mes modules de courant haché-pulsé . 2 fils d'entrée , 2 fils de sortie du courant et trois fils pour la commande .
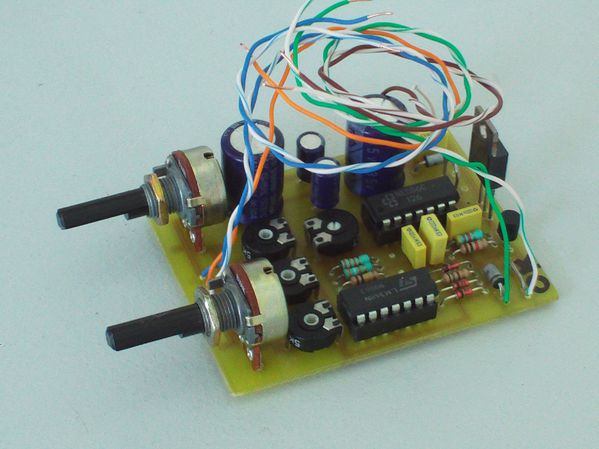
Avec les quelques ajustables on régle le point neutre et également la fréquence des impulsions ( elles seront en 14 Volts mais sous une fréquence réglable en Hz ) . Avec les deux potentiomètres de facade on réglera la vitesse d'accélération et la vitesse de décélération , ce qui créera une certaine inertie conformément à la réalité .
Avec les trois fils de commande , on commandera soit la mise en accélération , soit la mise en ralentissement . Si on a un point milieu de commande au neutre on aura en plus posibilité d'une " marche sur erre " ...
Logiquement on prépare les paramétres réglables ( fréquence , neutre , vitesse maxi , mini , inertie à l'accélération et à la décélération ) ensuite on ne fait que commander avec les trois fils .
Les commandes seront branchées en " tout-ou-rien " par un interupteur 1 RT ou un relais , ou bien seront prévues de manière progressive avec un boitier à main et soit des boutons poussoirs soit un interupteur 1 RNT .
Voici un schéma qui reprend les différents branchements des modules .
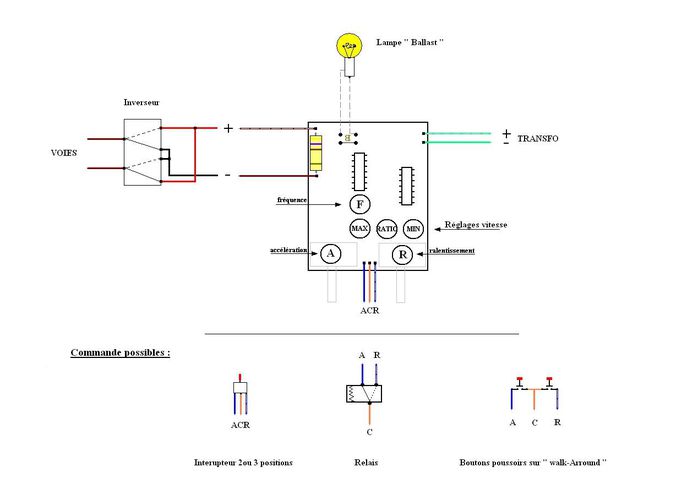
Avec un branchement par l'intermédiaire de relais une gestion automatisée sera réalisable ... ou même une gestion mixte bien sûr de manière à pouvoir laisser les trains gérer par eux-même ou bien à prendre le relais personnellement sur certaines voies de gare ...


