Avant d'arriver à nos petits moteurs le cheminement est long ... depuis la centrale électrique .
Par chez nous il y a 99% de chance qu'elle arrive directement de la centrale de Gravelines ( située à 25 KM environ ) , centrale nucléaire de six tranches ( au lieu des douze prévues initialement ) inondant le Nord de France ainsi que nos voisins proches de son flux d'ions ...
Bref , ceci écrit , même une fois arrivé dans la Ptit-Trains-Room , le courant 220 Volts est encore à transformer pour nos ( mes ) locos : il faut à nouveau une centrale électrique ... ou , plus simplement , " du transfo. " pour adapter la puissance aux activités miniatures . C'est à cette tâche que je suis occupé en ce moment .
Après quelques tergiversations de départ et la mise sur le côté du projet pour interrogations trop grandes de ma part , le travail avance plus sereinement maintenant .
Photo: Projet avorté d'il y a trois semaines environ ; J'avais acheté des roulettes cet Eté pour équiper ma future centrale électrique . Une amorce de travail sur un grand C.T.P. de 10 mm avait vu le jour et je pensais faire un seul grand pupitre général mais , devant certaines incertitudes , il était laissé en plan .

Mon soucis était de résoudre deux choses antagonistes : Grouper mon arrivée de 220 Volts en un point ; Limiter mes câblages dispatchés vers les différents cantons .
Jusqu'alors j'ai utilisé les différentes prises de 220 Volts prévues et disséminées sur le pourtour de ma pièce ( 5 points que j'ai jugé stratégiques lors des passages des câbles électriques avant isolation en 2007 sur lequels sont mise en place 5 multiprises à interupteur ) .
Pour pouvoir brancher le réseau , j'avais fait deux petits groupements " tranfos , régulation de tension , électroniques puissance et régulation des voies " en deux points opposés : Un sous la grande gare cachée N°1 , l'autre sous la gare cachée N°2 , les deux zones se faisant face .
J'ai aussi mis un troisième point 220 Volts sur lequel un transfo. Train Hornby est branché pour alimenter les bobinages d'aiguilles de l'accès à la gare cachée N°1 .
Pour aller jouer au train il me fallait jusqu'à maintenant allumer trois multiprises différentes ...
J'ai donc sérieusement repris les choses en main pour faire suite à mon chamboulement dû à l'arrivée de mes nouvelles platines d'alimentation ...
Lors du décès de mon Grand-Père , j'ai récupéré deux trois babioles , plus en souvenirs que par besoin , et certaines sans grande conviction . En faisant partie , j'avais gardé dans le rampant de la cuisine deux petites commodes à tiroirs ...
Photo : Les deux petites commodes en question ; Très proches , elles ne sont cependant pas tout à fait identiques au niveau de leurs conceptions . Peu importe , l'usage qui en sera fait sera de toute façon détourné ( Papy , je t'en prie pardonnes-moi , c'est pour la bonne cause !! ![]() )...
)...

Ma réflexion menée à terme est de " grouper-séparer " : Je vais faire deux blocs électriques distincts .
Dans le premier se trouvera l'ensemble des transfos. et régulateurs de tension de grosse puissance nécessaires au réseau ( 14-17 Volts "traction" , 14 Volts "électronique" , 17 Volts "accessoire" ) .
Ce sera aussi un bloc qui contiendra une partie de l'électronique d'alimentation et de détection des cantons , d'itinéraires des aiguilles , de gestions des départs de trains . Des relais , et autres choses nécessaire compléteront le tout ...
De ce premier bloc partiront des " feeders " de tensions vers le second bloc qui sera côté opposé du réseau . Ce second bloc ne comportera lui que des platines électroniques .
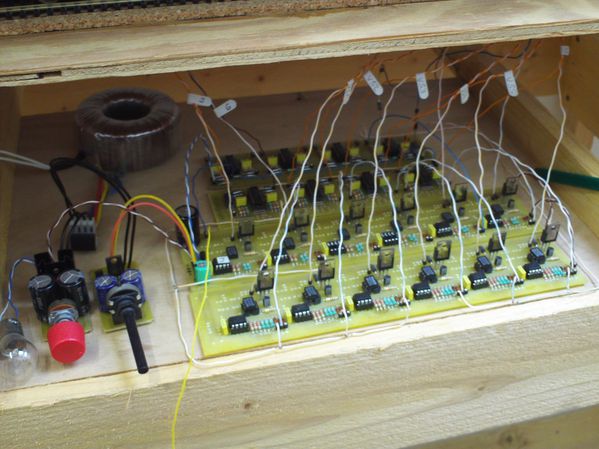
Photo : Premier bloc , étage du bas : Le travail avance pour transformer le 220 Volts !
Dans le caisson , mis à l'envers et sur roulettes , j'ai placé 7 des 8 transfos. toroïdaux que je possède : ces transfos. serviront à alimenter les voies de cantons . Le huitième est gardé " de rechange " pour le cas où un de ceux-ci grillerai ...
Normalement ça ne devrait pas avoir lieu !!! ![]() , ce type de transformateur étant très performant et très sûr .
, ce type de transformateur étant très performant et très sûr .
A l'époque de leur achat , je les ai choisi pour leur double sortie : 14 Volts , 3 Ampères + 9 Volts , 2 Ampères ; Plus que suffisant !!...
Le 14 Volts était destiné pour les alimentations en zones visibles , le 9 Volts pour les zones cachées . Avec les alimentations en PWM-MLI par PICs la donne est changée : je ne vais utiliser que le 14 Volts . De plus , le système des alimentations par impulsions est beaucoup moins énergivore que celui utilisant du courant analogique .
Les fils "bleu-gris" 9 Volts restent au sol ; Les fils "rouge-jaune" 14 Volts sont coupés des prises d'origine et passés sur dominos pour être prolongés . Au pire les sept fois 9 volts-2 Ampères pouront toujours être utiles et récupérés ultérieurement ...
Par ailleurs , sur les sept transfos. mis en place pour le moment , l'utilisation de six est réellement prévue ; Le septième est là " en réserve " .
J'ai ensuite placé un gros " transfo-prise " que j'ai bidouillé ( redressement-lissage de la tension ) : il me donne maintenant en sortie du 14 Volts stabilisés pour 1,5 Ampères maxi : ce sera pour mon alimentation électronique générale . Une fois de plus grâce aux PICs , l'usage de nombreux relais a été shunté , ce sont autant de besoins électriques en moins !... Cette puissance devrait suffire .
Une petite alimentation spécifique couplée à une batterie sera mise en place pour garantir la mise sous tension permanente de certains PICs qui géreront les départs des trains , le tout afin de sauvegarder en permanence le déroulement du programme en cours .
Vient s'ajouter un transfo. Train Jouef pour sa sortie accessoire 17 Volts alternatifs qui alimentera les platines à capacités actionnant les aiguilles . Il reste sa sortie " voie " disponible .
Un câble avec une prise moulée ( 16 A ) et un disjoncteur automatique de 10 A avec accès par le côté complètent la liaison vers le secteur . Je pense sécuriser un peu plus avec l'ajout d'un porte-fusible par transfo. toroïdal ... voir mettre un disjoncteur automatique de moindre ampèrage

Il me reste encore sous le coude deux transfos. de train , plusieurs transfo-prises , une grosse alimentation stabilisée régulée , deux petites alimentations + - 15 Volts avec point milieu , une alim. ATX neuve , divers transfos. de récup ... de quoi voir venir et ajouter si le besoin se faisait sentir ; Le soucis sera plutôt dans ce cas de revoir la base de l'installation .









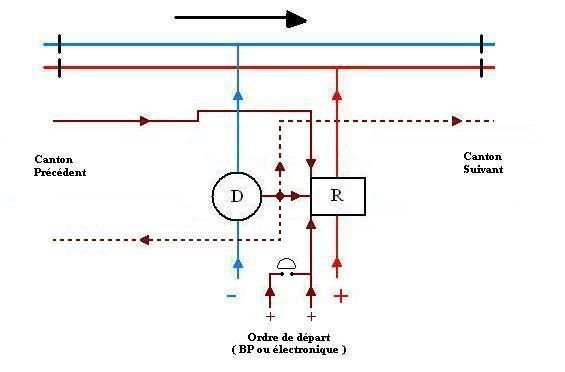
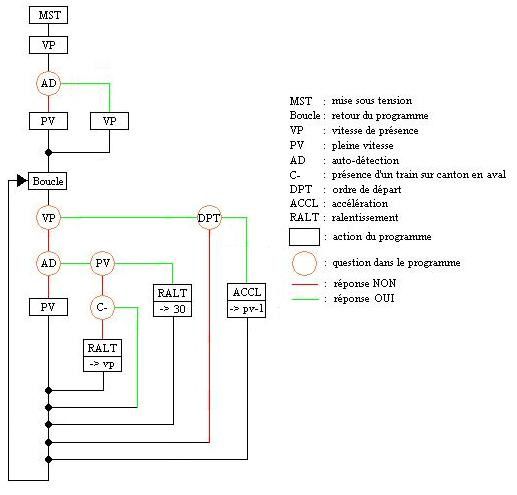
 Je vous propose de détailler une version ( assez ) simplifiée de l'organigramme de mon programme " pleine voie " ( je ne parlerai pas des divers paramètres techniques laissés de côté ici qui rendent cet organigramme plus dense en programmation réelle ) .
Je vous propose de détailler une version ( assez ) simplifiée de l'organigramme de mon programme " pleine voie " ( je ne parlerai pas des divers paramètres techniques laissés de côté ici qui rendent cet organigramme plus dense en programmation réelle ) .